ミミズの運動を制御する主要ニューロンを発見、ヒトの治療に重要
最後に見直したもの: 02.07.2025

すべてのiLiveコンテンツは、可能な限り事実上の正確さを保証するために医学的にレビューまたは事実確認されています。
厳格な調達ガイドラインがあり、評判の良いメディアサイト、学術研究機関、そして可能であれば医学的に査読された研究のみにリンクしています。 かっこ内の数字([1]、[2]など)は、これらの研究へのクリック可能なリンクです。
当社のコンテンツのいずれかが不正確、期限切れ、またはその他の疑問があると思われる場合は、それを選択してCtrl + Enterキーを押してください。

シナイ・ヘルスとトロント大学の研究者らは、ヒトの病気の治療やロボット工学の発展に重要な影響を与える可能性のある、小さな線虫C.エレガンスの神経系のメカニズムを発見した。
ルーネンフェルト・タネンバウム研究所のメイ・ジェン氏らが主導したこの研究は、サイエンス・アドバンシズ誌に掲載されており、線虫の前進と後進を切り替える能力を制御する上でAVAと呼ばれる特定のニューロンが重要な役割を果たしていることを明らかにしている。
ミミズにとって、餌場に向かって這い進み、危険から素早く逃げることは不可欠です。この二つの行動は互いに排他的であり、同時に座りながら走ることができない人間を含む多くの動物によく見られます。
科学者たちは長年、線虫の運動制御は2つのニューロン、AVAとAVBの単純な相互作用によって実現されていると信じてきました。前者は後方への運動を、後者は前方への運動を促進し、それぞれが他方の運動を抑制することで運動方向を制御していると考えられていました。
しかし、Zhen氏のチームによる新たなデータはこの見解に異議を唱え、AVAニューロンが二重の役割を果たす、より複雑な相互作用を明らかにしました。AVBニューロンの抑制によって前進運動を即座に停止させるだけでなく、AVBニューロンへの長期的な刺激を維持することで、前進運動へのスムーズな移行を確実にします。
この発見は、AVA ニューロンがさまざまな信号とさまざまな時間スケールに応じてさまざまなメカニズムを通じて動きを細かく制御する能力を浮き彫りにしています。
「工学的な観点から見ると、これは非常に経済的な設計です」と、トロント大学テメルティ医学部の分子遺伝学教授であるジェン氏は語る。「フィードバックループを強力かつ持続的に抑制することで、動物は悪条件に反応し、逃走することができます。同時に、制御ニューロンは安全な場所に移動するために、前進ループに一定のガスを送り続けます。」
この研究を率いた、鄭研究室の元博士課程の学生であるジュン・メン氏は、動物がこのような相反する運動状態の間をどのように移行するかを理解することは、動物の運動の仕組みを理解する鍵となるだけでなく、神経疾患の研究にも役立つと述べた。
AVAニューロンの優位な役割の発見は、半世紀以上前の現代遺伝学の出現以来、科学者が研究してきた神経回路に新たな知見をもたらします。鄭氏の研究室は、最先端技術を駆使して個々のニューロンの活動を正確に調節し、運動中の生きた線虫からデータを記録することに成功しました。
トロント大学文理学部の細胞生物学・システム生物学教授でもあるジェン氏は、本研究における学際的な連携の重要性を強調しています。メン氏が主要な実験を行い、ニューロンからの電気的記録は、中国華中科技大学のシャンバン・ガオ研究室の博士課程学生であるビン・ユー氏が行いました。
鄭氏の研究室の元博士研究員で、現在は米国HHMIのジャネリア研究キャンパスの理論研究員であるトシフ・アーメド氏は、仮説を検証し、新たな洞察を得るために重要な数学モデルの構築を主導した。
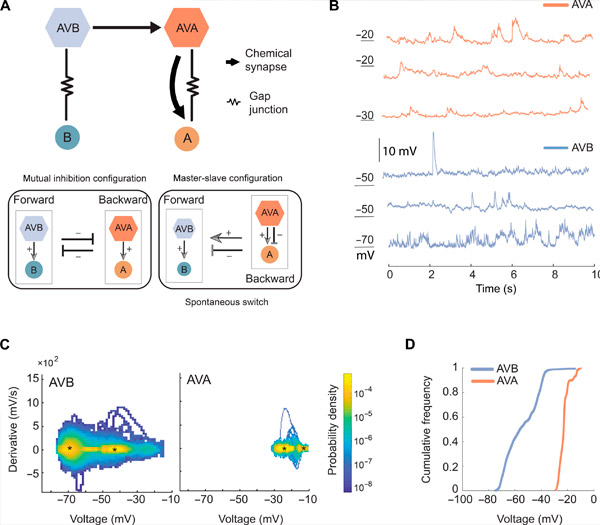
AVAとAVBは膜電位の範囲とダイナミクスが異なる。出典:Science Advances (2024). DOI: 10.1126/sciadv.adk0002
この研究の発見は、ニューロンが運動制御において複数の役割をどのように管理できるかを研究するための簡略化されたモデルを提供しており、この概念は人間の神経学的状態にも応用できる可能性がある。
例えば、AVAの二重の役割は、その表面にあるイオンチャネルによって制御される電位に依存しています。鄭氏は既に、同様のイオンチャネルの変異によって引き起こされるCLIFAFHDD症候群と呼ばれる希少疾患において、同様のメカニズムがどのように関与しているかを調査しています。今回の新たな発見は、複雑な動作を実行できる、より適応性と効率性に優れたロボットシステムの設計にも役立つ可能性があります。
「近代科学の起源から今日の最先端研究に至るまで、C.エレガンスのようなモデル生物は、私たちの生物システムの複雑さを解明する上で重要な役割を果たしてきました」と、ルーネンフェルド・タネンバウム研究所所長であり、サイナイ・ヘルスの研究担当副社長であるアンヌ=クロード・ギングラス氏は述べています。「この研究は、単純な動物から学び、その知識を医学と技術の進歩に応用できることを示す素晴らしい例です。」